style: html to md syntax
This commit is contained in:
@@ -6,11 +6,11 @@
|
||||
|
||||
而在此栏目中,我们将讲述相关操作系统在嵌入式上的应用,让你的嵌入式产品更加的智慧!(当然裸机并不一定就比带操作系统的嵌入式产品差,只是应用方向不同或者说有时候需要考虑产品的成本问题)
|
||||
|
||||
Ps:本栏目只例举几个目前开发工程中常见的操作系统的学习与开发,<strong>具体的移植过程可 web 或者自行探索 - 相信我,出色的移植能力是嵌入式开发者必不可少的。</strong>
|
||||
Ps:本栏目只例举几个目前开发工程中常见的操作系统的学习与开发,**具体的移植过程可 web 或者自行探索 - 相信我,出色的移植能力是嵌入式开发者必不可少的。**
|
||||
|
||||
## RTOS
|
||||
|
||||
MCU 本身就能做到一定的实时性,那为什么还是需要 RTOS(实时操作系统)呢,<strong>其实评判实时系统的关键并不是系统对外部事件的处理速度,而是处理事件的时间的可预见性和确定性。</strong>举个例子,Windows 操作系统在 CPU 没有其他任务时可以在很短的时间内对外部事件作出一定的响应,但是当某些后台任务在运行时,有时候响应速度会变得很慢甚至出现假死现象,这并不是因为 Windows 速度不够快或者效率不够高导致的,而是因为 Windows 对事件的响应不能提供准确性,所以其不能算作一个实时操作系统。<strong>并且在笔者看来,实时操作系统除了可以达到完成每次任务所需时间的一致性外,其相应的操作系统产品(例如我们本栏目将重点介绍的 FreeRTOS,这里可以简单提一下为啥要选 FreeRTOS,显而易见因为-Free)还具有可以简化整体架构、开发等工作的作用。</strong>
|
||||
MCU 本身就能做到一定的实时性,那为什么还是需要 RTOS(实时操作系统)呢,**其实评判实时系统的关键并不是系统对外部事件的处理速度,而是处理事件的时间的可预见性和确定性。**举个例子,Windows 操作系统在 CPU 没有其他任务时可以在很短的时间内对外部事件作出一定的响应,但是当某些后台任务在运行时,有时候响应速度会变得很慢甚至出现假死现象,这并不是因为 Windows 速度不够快或者效率不够高导致的,而是因为 Windows 对事件的响应不能提供准确性,所以其不能算作一个实时操作系统。**并且在笔者看来,实时操作系统除了可以达到完成每次任务所需时间的一致性外,其相应的操作系统产品(例如我们本栏目将重点介绍的 FreeRTOS,这里可以简单提一下为啥要选 FreeRTOS,显而易见因为-Free)还具有可以简化整体架构、开发等工作的作用。**
|
||||
|
||||
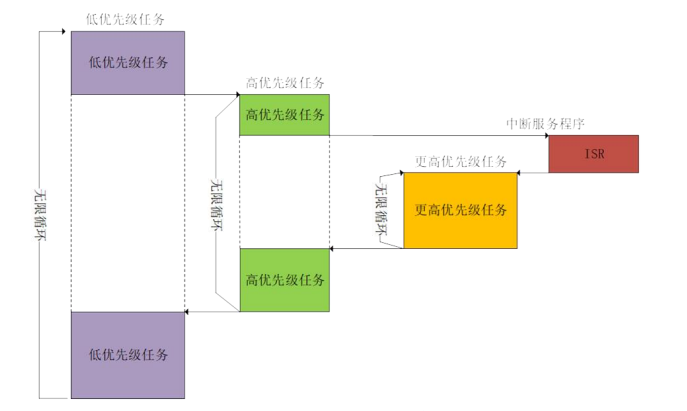
RTOS 中最重要的概念则是“任务”。
|
||||
|
||||
@@ -24,7 +24,7 @@ RTOS 中最重要的概念则是“任务”。
|
||||
|
||||
|
||||
|
||||
所以,<strong>其实可以这么说:RTOS 将整个流程变成了很多个 while(1)【每个任务都是个 while(1)】。</strong>
|
||||
所以,**其实可以这么说:RTOS 将整个流程变成了很多个 while(1)【每个任务都是个 while(1)】。**
|
||||
|
||||
并且根据我上述所描述的内容,一个任务需要的属性大致如下(以启动函数为例进行介绍):
|
||||
|
||||
@@ -63,7 +63,7 @@ int main(){
|
||||
|
||||
如果你已经对以上所涉及到的方面有了一定的了解,那么欢迎来到机器人开发者的殿堂-Robot Operating System!
|
||||
|
||||
由于硬件技术的飞速发展,针对于机器人软件设计的框架也面临着极大的挑战,而 ROS 的出现无异是所有机器人开发者的福音,因为如果按照以前的制作一个机器人流程来讲,也许你要经历以下步骤:硬件结构搭建、控制处理、相关算法构建等等,但是 ROS 的开源共享模式令其可以在其平台上巧妙利用别人的开源模型完成自己的机器人搭建,<strong>也就是说 Ros 的出现打破了原本各个开发者(或团队)闭门造车的开发现象,使得其可以共享优秀的机器人应用软件,换句话说就是提高了机器人研发的软件复用率。(毕竟哪个团队都不可能同时在建图、导航、视觉等机器人应用方面处于顶尖位置)</strong>
|
||||
由于硬件技术的飞速发展,针对于机器人软件设计的框架也面临着极大的挑战,而 ROS 的出现无异是所有机器人开发者的福音,因为如果按照以前的制作一个机器人流程来讲,也许你要经历以下步骤:硬件结构搭建、控制处理、相关算法构建等等,但是 ROS 的开源共享模式令其可以在其平台上巧妙利用别人的开源模型完成自己的机器人搭建,**也就是说 Ros 的出现打破了原本各个开发者(或团队)闭门造车的开发现象,使得其可以共享优秀的机器人应用软件,换句话说就是提高了机器人研发的软件复用率。(毕竟哪个团队都不可能同时在建图、导航、视觉等机器人应用方面处于顶尖位置)**
|
||||
|
||||
|
||||
|
||||
@@ -71,9 +71,9 @@ int main(){
|
||||
|
||||
但是 Linux 只是一个通用系统,并没有在机器人开发上提供相应的中间件,所以 ROS 提供了基于 TCP/UDP 的通信接口(机器人的工作当然需要通讯),在再此之上提供了相应的基础开发库供给至应用层。
|
||||
|
||||
此时应用层则有个很重要的概念-Master(管理者),其负责管理整个系统的正常运行。如果我们需要获得比较成熟的相关领域开源机器人包,按以往的操作必将是进行一次比较复杂的移植(你需要考虑各种因素:比如硬件支持、与其他移植包是否冲突等等)。<strong>但是在 ROS 系统中引入了功能包的概念,你可以在 ROS 社区中下载相关版本(与你的 ROS 版本相匹配)的机器人应用功能包,完成一次非常简单的移植过程(CV),你不需要关注其内部的具体运行机制,只需关注接口的定义与使用规则便可进行相应的二次开发(在 ROS 中你需要关注的是相关节点之间的关系,可以通过 rqt_graph 获取清晰的节点图),相当于给你做好了一个跟机器人开发有关的高集成度</strong><strong>SDK</strong><strong>平台。</strong>(当然如果你感兴趣的话可以做一定的了解,但这将牵扯到相关内容的庞大体系,比如如果你想了解自主导航是如何运行的,你首先需要了解 SLAM 算法的运行机制以及激光雷达或者相关深度摄像机的运用,然后你需要了解什么是深度信息什么是里程计信息,为什么可以表示机器人的位置信息,要如何进行一些相关的位置信息修正,然后 bulabula。<strong>以笔者自身的学习经历而言,学习相关的理论基础体系,将对你的二次开发有极大的帮助,而不会造成盲目使用接口的情况</strong>)
|
||||
此时应用层则有个很重要的概念-Master(管理者),其负责管理整个系统的正常运行。如果我们需要获得比较成熟的相关领域开源机器人包,按以往的操作必将是进行一次比较复杂的移植(你需要考虑各种因素:比如硬件支持、与其他移植包是否冲突等等)。**但是在 ROS 系统中引入了功能包的概念,你可以在 ROS 社区中下载相关版本(与你的 ROS 版本相匹配)的机器人应用功能包,完成一次非常简单的移植过程(CV),你不需要关注其内部的具体运行机制,只需关注接口的定义与使用规则便可进行相应的二次开发(在 ROS 中你需要关注的是相关节点之间的关系,可以通过 rqt_graph 获取清晰的节点图),相当于给你做好了一个跟机器人开发有关的高集成度****SDK****平台。**(当然如果你感兴趣的话可以做一定的了解,但这将牵扯到相关内容的庞大体系,比如如果你想了解自主导航是如何运行的,你首先需要了解 SLAM 算法的运行机制以及激光雷达或者相关深度摄像机的运用,然后你需要了解什么是深度信息什么是里程计信息,为什么可以表示机器人的位置信息,要如何进行一些相关的位置信息修正,然后 bulabula。**以笔者自身的学习经历而言,学习相关的理论基础体系,将对你的二次开发有极大的帮助,而不会造成盲目使用接口的情况**)
|
||||
|
||||
根据以上我讲述的相关内容可知:<strong>ROS 系统的优点在于,你能将社区里的有关机器人的开发模块集大成于一身,并且通过 ROS 与控制板通讯(此时类似于 STM32 的裸机主控便变成了控制板 - 用于接收 ROS 的调控完成相应电机、舵机的控制,或者完成一定的例如 oled 显示的简单任务),从而完成 ROS 系统内部开源算法对整个机器人的控制。</strong>
|
||||
根据以上我讲述的相关内容可知:**ROS 系统的优点在于,你能将社区里的有关机器人的开发模块集大成于一身,并且通过 ROS 与控制板通讯(此时类似于 STM32 的裸机主控便变成了控制板 - 用于接收 ROS 的调控完成相应电机、舵机的控制,或者完成一定的例如 oled 显示的简单任务),从而完成 ROS 系统内部开源算法对整个机器人的控制。**
|
||||
|
||||
以下我简单介绍一下 ROS 的基础通讯方式:
|
||||
|
||||
@@ -147,7 +147,7 @@ void chatterCallback(const std_msgs::String::ConstPtr& msg)
|
||||
|
||||
<Bilibili bvid='BV1zt411G7Vn'/>
|
||||
|
||||
<strong>提一嘴:很多人学 ROS 就学一个开头 - 比如就学了古月居的 21 讲,就认为自己已经了解到了 ROS 的大部分内容了</strong><strong>(不会有人现在还是纯看视频学习吧)</strong><strong>,实际上这是非常错误的想法。当你学完了视频的内容后,你甚至可能不会移植 wiki 上的功能包(x_x),甚至不知道如何去开发一个真实的机器人(因为此 21 讲只是理论上的讲解,去做一个虚拟机器人在 gazebo 上运行)。ROS 的学习上需要我们花大量的心思去学会接触新的东西,你们并不能只局限于我提供的推荐学习资料,因为相应的功能包不是一成不变的,而且也不是只有那么几个功能包,当你感受了 ROS 的自主建图、自主导航、机械臂控制、机器学习开发等等等等等等后,你才会发现 ROS 的世界是如此美妙!</strong>
|
||||
**提一嘴:很多人学 ROS 就学一个开头 - 比如就学了古月居的 21 讲,就认为自己已经了解到了 ROS 的大部分内容了****(不会有人现在还是纯看视频学习吧)****,实际上这是非常错误的想法。当你学完了视频的内容后,你甚至可能不会移植 wiki 上的功能包(x_x),甚至不知道如何去开发一个真实的机器人(因为此 21 讲只是理论上的讲解,去做一个虚拟机器人在 gazebo 上运行)。ROS 的学习上需要我们花大量的心思去学会接触新的东西,你们并不能只局限于我提供的推荐学习资料,因为相应的功能包不是一成不变的,而且也不是只有那么几个功能包,当你感受了 ROS 的自主建图、自主导航、机械臂控制、机器学习开发等等等等等等后,你才会发现 ROS 的世界是如此美妙!**
|
||||
|
||||
2、b 站赵虚左 ROS 课程(讲得细致多了,需要耐心看下去,要是我入门 ROS 的时候有这个视频就好了)
|
||||
|
||||
|
||||
Reference in New Issue
Block a user