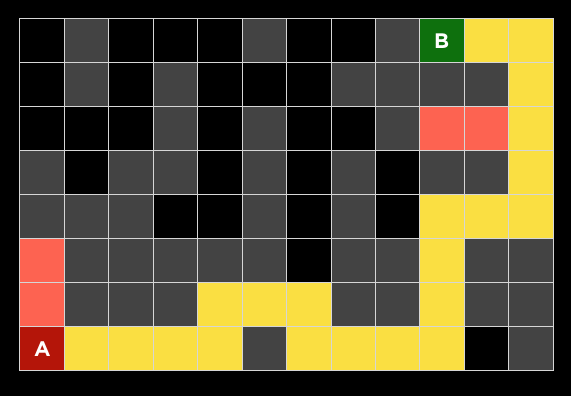
import{_ as n,D as h,c as l,j as s,a as i,I as k,a4 as p,o as t}from"./chunks/framework.DtvhUNIn.js";const u=JSON.parse('{"title":"程序示例——maze 迷宫解搜索","description":"","frontmatter":{},"headers":[],"relativePath":"技术资源汇总(杭电支持版)/4.人工智能/4.3.1.1程序示例——maze迷宫解搜索.md","filePath":"技术资源汇总(杭电支持版)/4.人工智能/4.3.1.1程序示例——maze迷宫解搜索.md"}'),e={name:"技术资源汇总(杭电支持版)/4.人工智能/4.3.1.1程序示例——maze迷宫解搜索.md"},E=s("h1",{id:"程序示例——maze-迷宫解搜索",tabindex:"-1"},[i("程序示例——maze 迷宫解搜索 "),s("a",{class:"header-anchor",href:"#程序示例——maze-迷宫解搜索","aria-label":'Permalink to "程序示例——maze 迷宫解搜索"'},"")],-1),r=s("div",{class:"warning custom-block"},[s("p",{class:"custom-block-title"},"😋"),s("p",null,"阅读程序中涉及搜索算法的部分,然后运行程序,享受机器自动帮你寻找路径的快乐! 完成习题")],-1),d={class:"tip custom-block"},g=s("p",{class:"custom-block-title"},"📥",-1),y=p(`
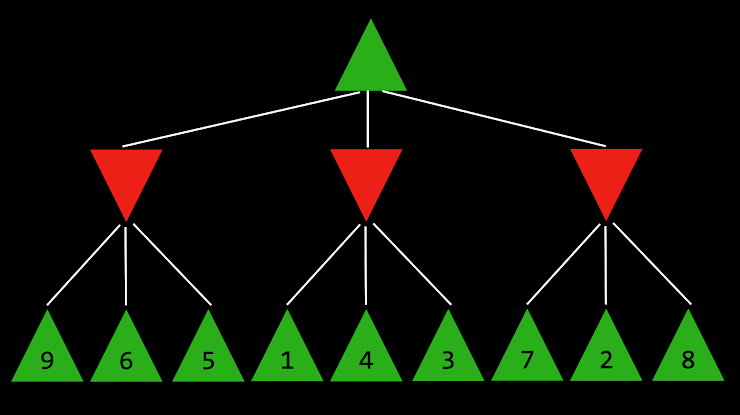
下面的问题将询问您关于下面的 Minimax 树,其中绿色向上箭头表示 MAX 玩家,红色向下箭头表示 MIN 玩家。每个叶节点都标有其值。
根节点的值是多少?
2
3
4
5
6
7
8
9
`,19);function F(o,c,A,D,C,B){const a=h("Download");return t(),l("div",null,[E,r,s("div",d,[g,s("p",null,[i("本节附件下载 "),k(a,{url:"https://cdn.xyxsw.site/code/1-Lecture.zip"})])]),y])}const _=n(e,[["render",F]]);export{u as __pageData,_ as default};